Abstract
Quadruped robots exhibit superior terrain adaptability and mobility, enabling autonomous navigation in complex environments. However, path planning for quadruped robots is inherently challenging due to the non-circular and high-dimensional nature of their collision model, which introduces a trade-off between collision detection accuracy and planning robustness. To overcome this challenge, we propose the concept of a 3D Rotatable Area (3D RoA). The 3D RoA represents the range of collision-free and stable yaw angles at a given position, explicitly capturing local terrain geometry and collision constraints. Based on the 3D RoA, we further present a path planning framework that efficiently recognizes and navigates highly cluttered environments. Our approach generates traversable and collision-free SE(3) paths through 2D search, reducing the search space while accurately handling the collision geometry of the quadruped robot. The effectiveness of the proposed framework is validated through extensive simulations and real-world experiments using multiple platforms.
Contributions
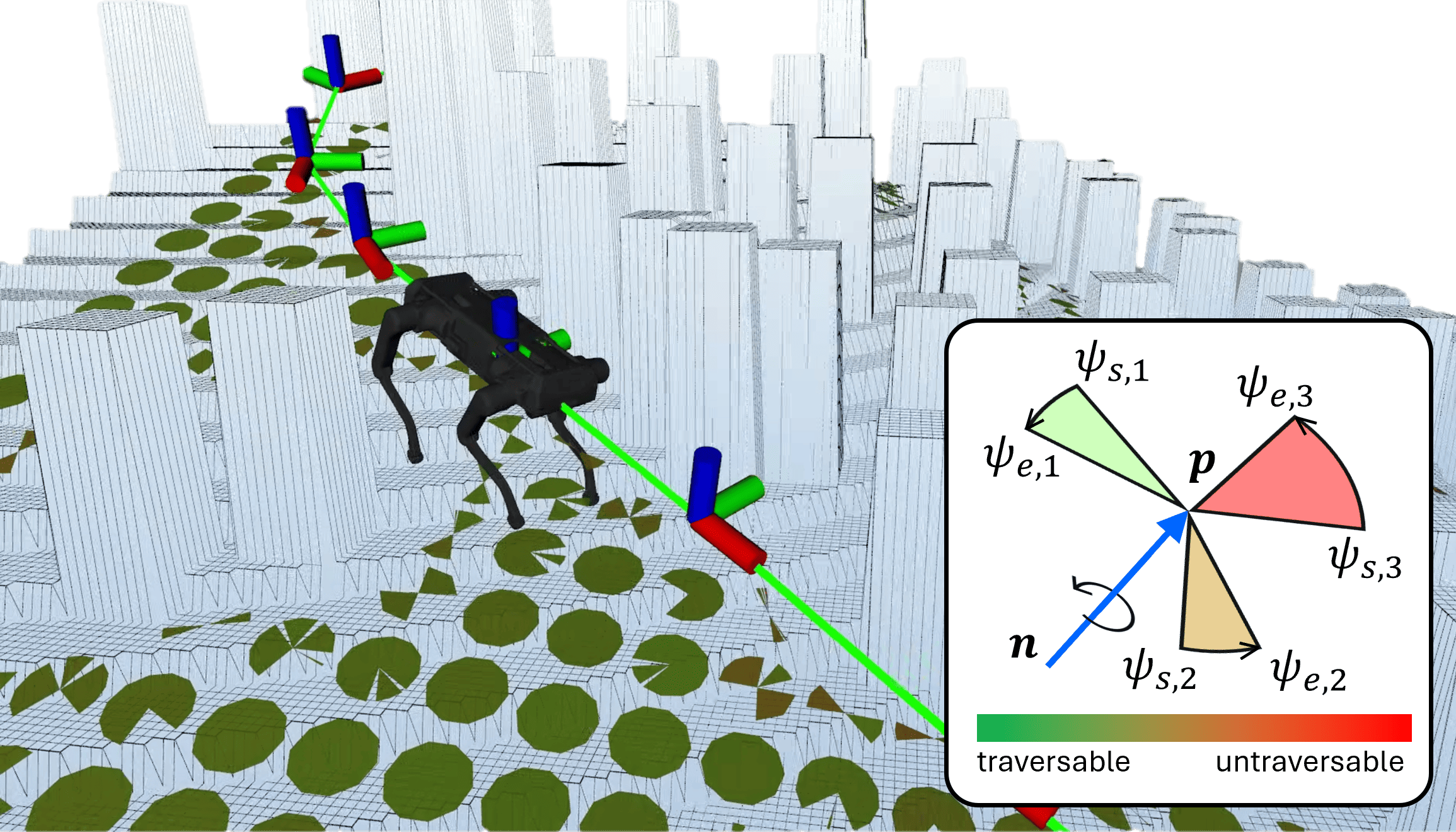
3D Rotatable Area Framework
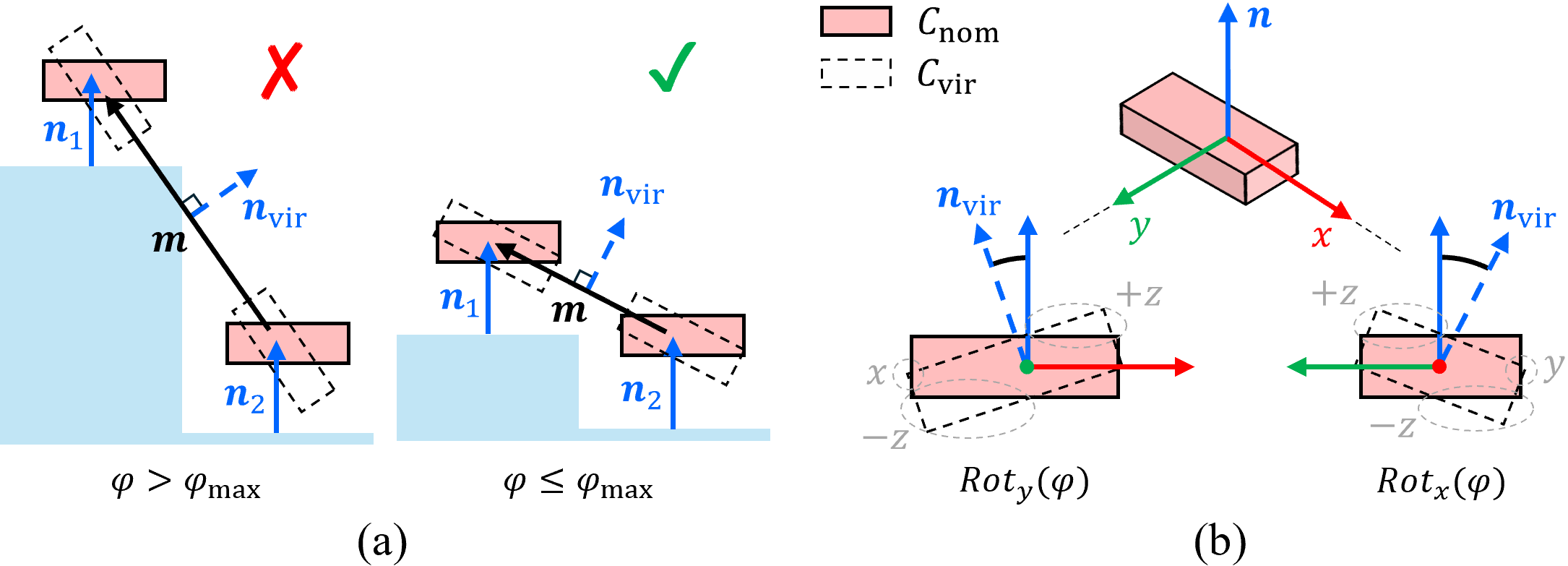
We propose the 3D RoA, which assesses collision-free rotation by incorporating 3D environment geometry and asymmetric cuboid collision model of quadruped robots.
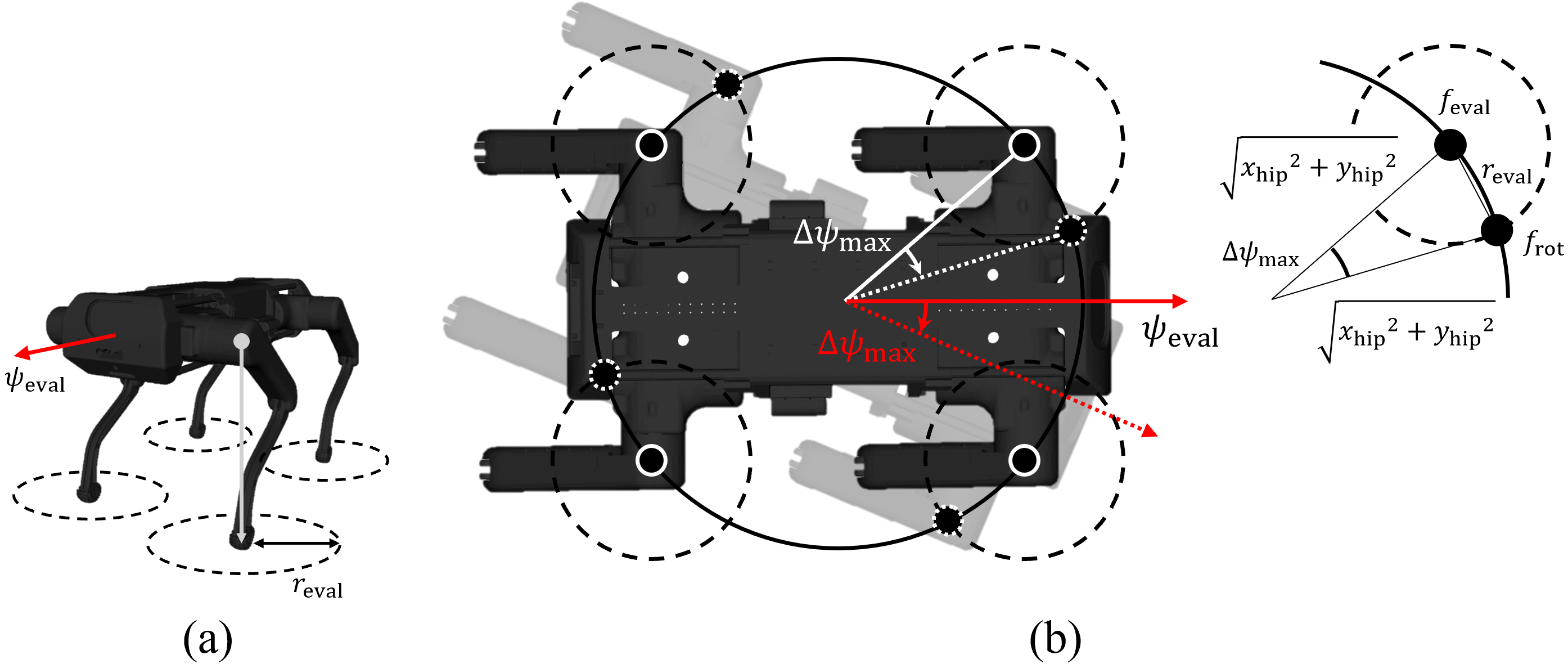
Traversability Consideration
We incorporate traversability and physical constraints into the 3D RoA to enhance path safety, proposing an adaptive evaluation method tailored to kinematic reachability.
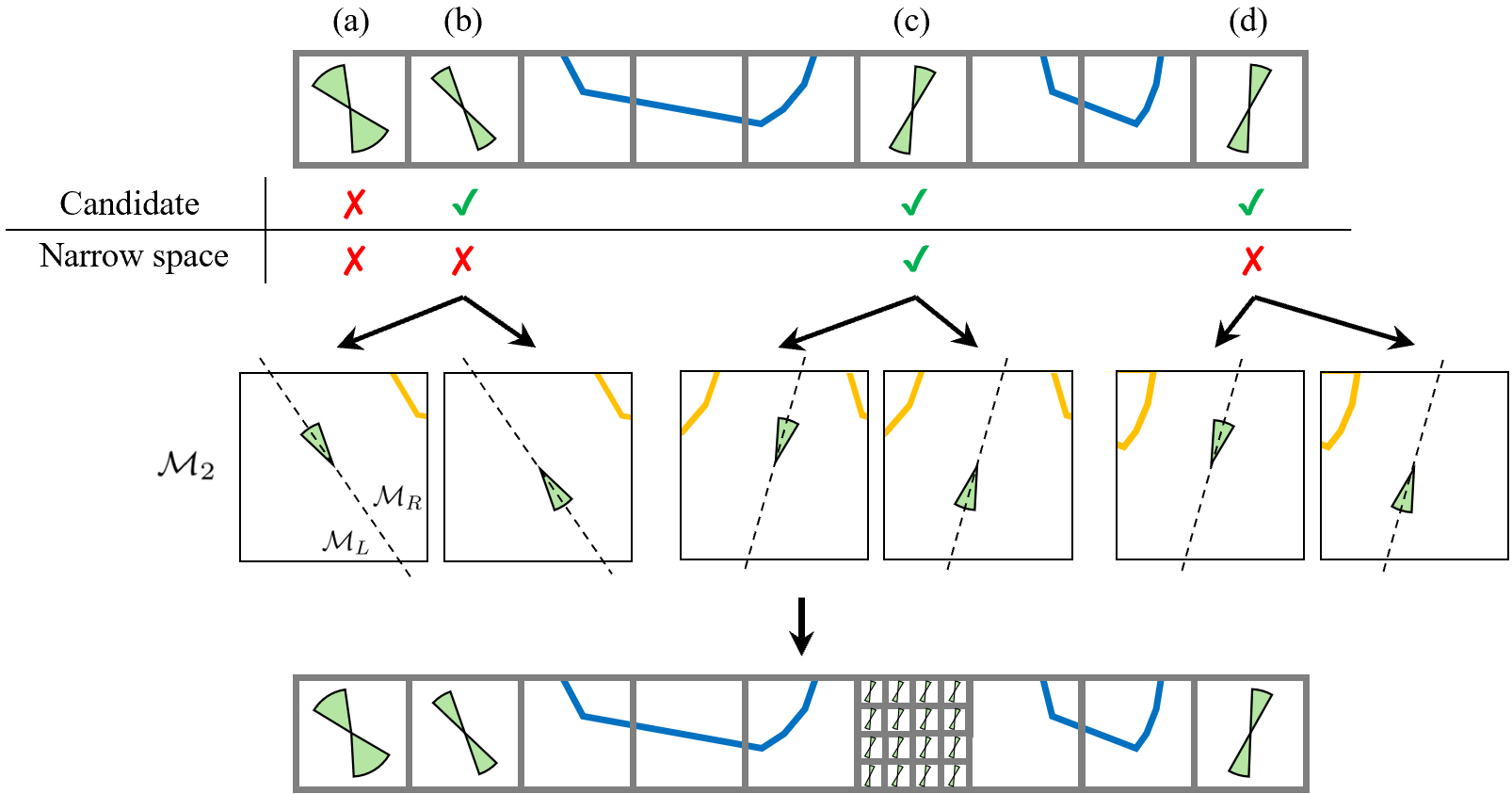
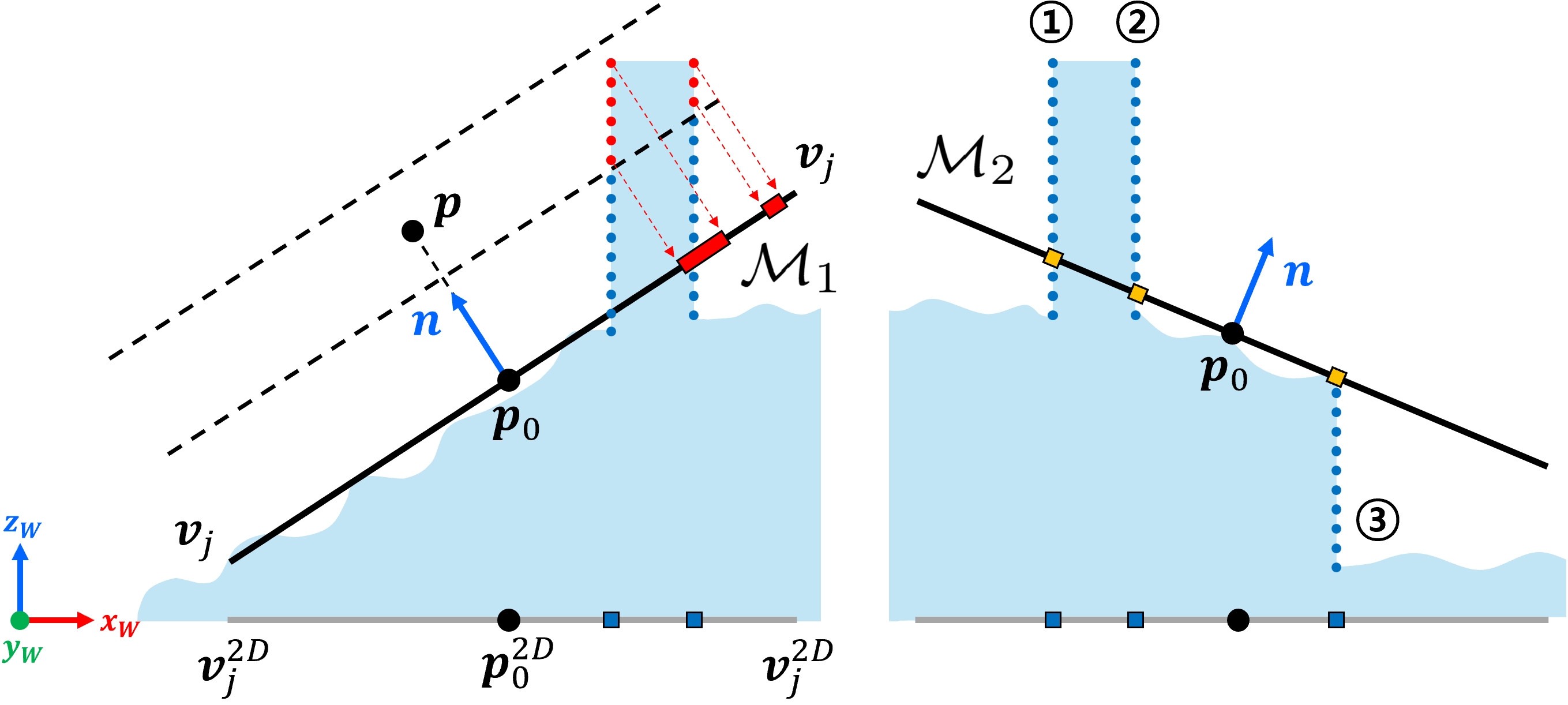
RoA-Aware Quadtree
We propose a 3D RoA-based hierarchical quadtree, enabling high-fidelity detection of narrow spaces comprising obstacles and cliffs with optimal spatial partitioning.
Plane Condition
We formulate the Plane condition (P-cond) to evaluate local motion feasibility, enabling SE(3) path planning within 2D search space with minimal overhead.
Quantitative Comparisons
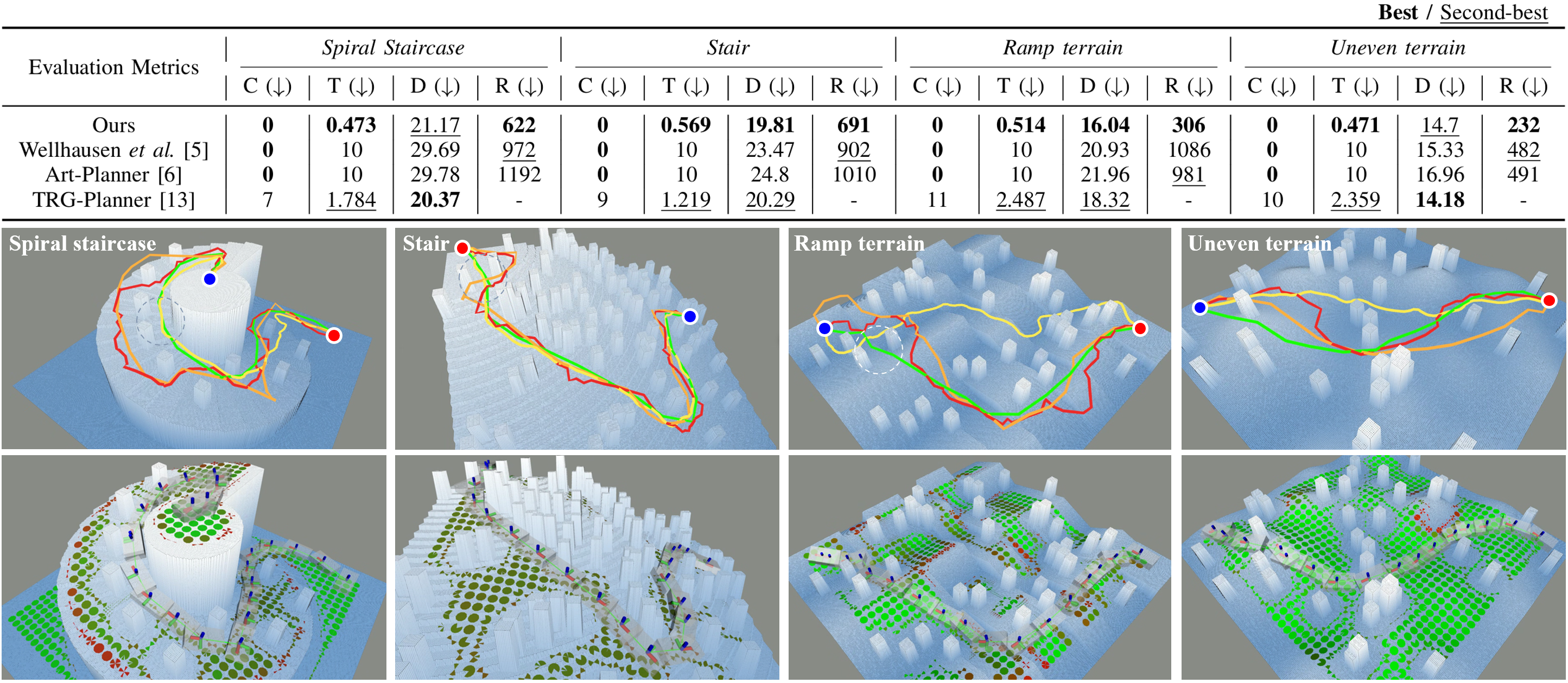
Obstacle-dense Environments: Comparisons using AiDIN-VIII in 10 × 10 m$^2$ stairs and rough terrains densely packed with pillars. In the table, C, T, L, and R represent collisions, total time for mapping and path planning (s), total length (m), and cumulative rotation ($^\circ$), respectively. The first row of figures shows the paths generated by ours (green), Wellhausen et al. (orange), Art-Planner (red), and TRG-Planner (yellow). The red and blue points represent the start and the goal of the path, respectively. The second row of figures shows the collision models at the waypoints of the path generated by our method and the 3D RoA-Map.
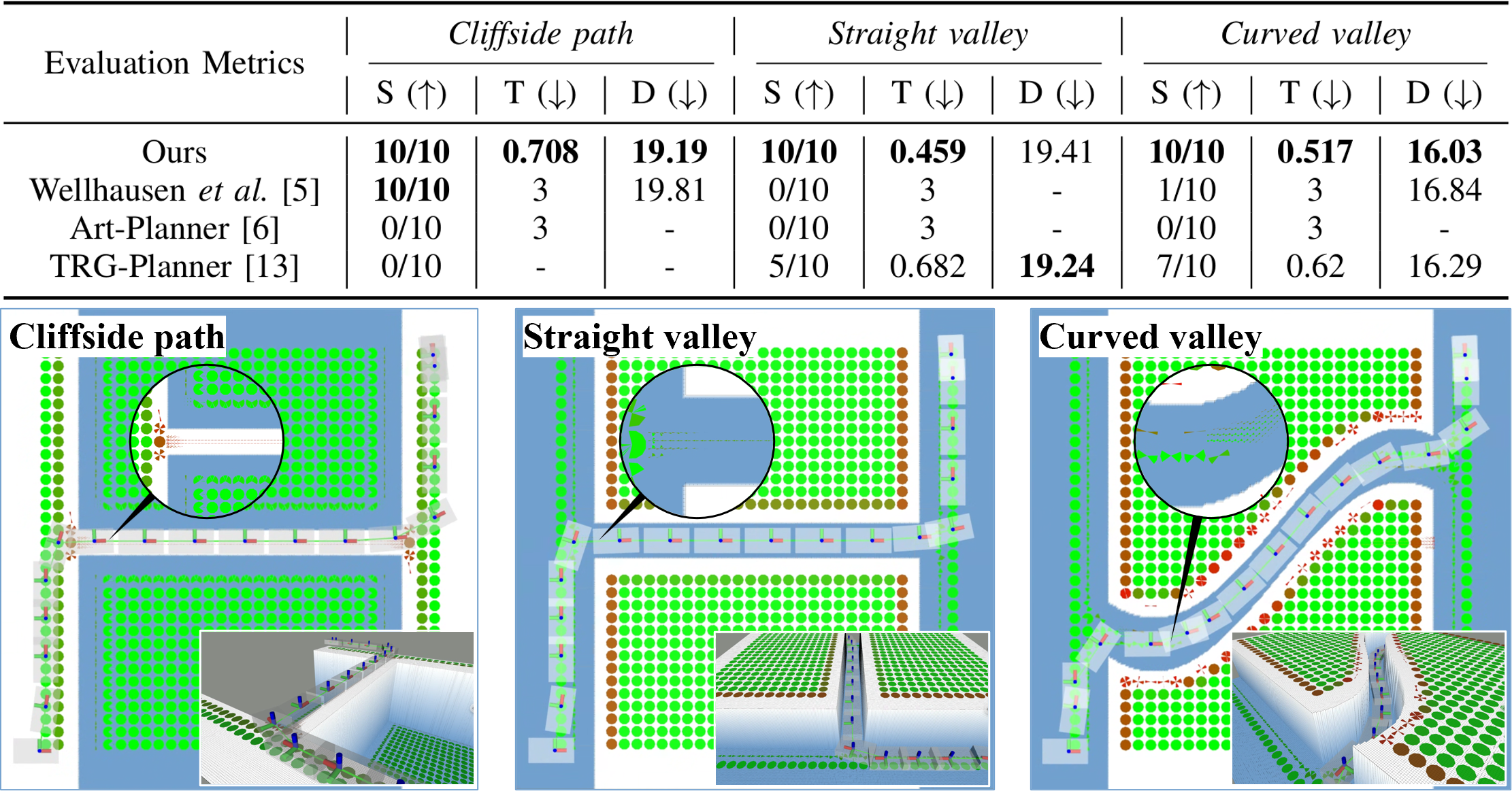
Narrow Spaces: Robustness comparison using AiDIN-VIII in 10 × 10 m$^2$ narrow spaces. S denotes the planning success rate. Our method is deterministic, but we report success as 10/10 for notation consistency. The zoomed-in circle highlights RoAs subdivided due to detecting cliffs or obstacles on both sides.
Video
BibTeX
@ARTICLE{11495083,
author={Son, Yeongwoo and Lee, Hyunyong and Kang, Hansol and Park, Jiman and Nam, SeongWon and Oh, Jaeyoung and Yi, Bumsu and Yu, Hyeonwoo and Choi, Hyouk Ryeol},
journal={IEEE Robotics and Automation Letters},
title={3D RoA-Planner: Path Planner for Quadruped Robots in Confined Spaces Using 3D Rotatable Areas},
year={2026},
volume={11},
number={6},
pages={7436-7443},
keywords={Filtering;Filters;Circuits and systems;Pixel;Location awareness;Digital images;Electronic mail;Instant messaging;LoRa;Videos;Motion and path planning;legged robots;navigation;collision avoidance},
doi={10.1109/LRA.2026.3688059}}
}